

optimiert ab
1280 x 768
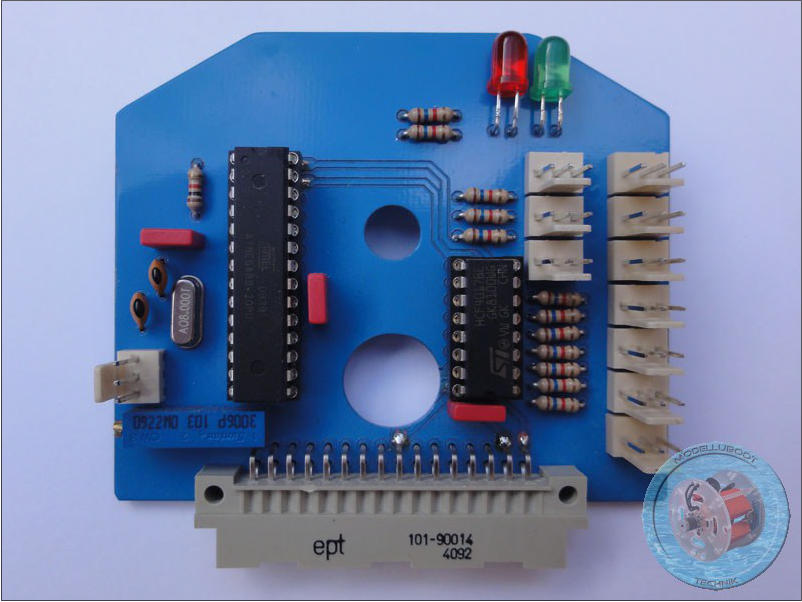
Überprüft das Summensignal des Empfängers auf
Gültigkeit, dekodiert es in die einzelnen Kanäle und
stellt diese Information über den Bus zur
Verfügung. Einzelne defekte Impulspakete werden
geglättet oder durch gültige Daten des letzten
Pakets ersetzt. Das Modul besitzt Ausgänge für bis
zu 10 Standard-RC-Servos.
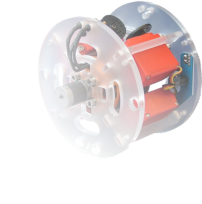
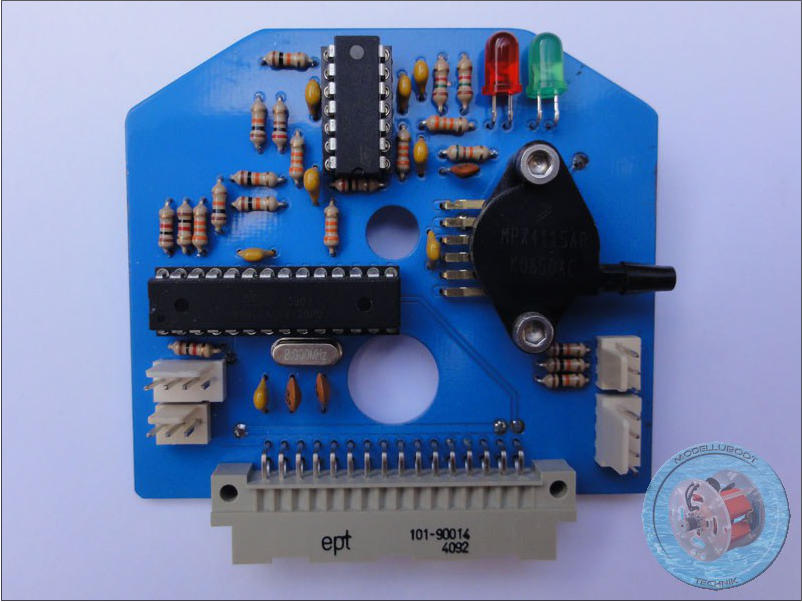
Hauptrechner des Bootes. Hier ist fast die komplette
Steuerfunktionalität des Bootes
untergebracht. Der Controller
kommuniziert über einen I²C-
Bus mit den anderen Modulen
und überwacht deren
Reaktionszeiten. Hier werden
die Schalt- und Steuersignale
vom Sender ausgewertet und
die verschiedenen Regelungen
ausgeführt. Der Drucksensor
rechts ist für die statische
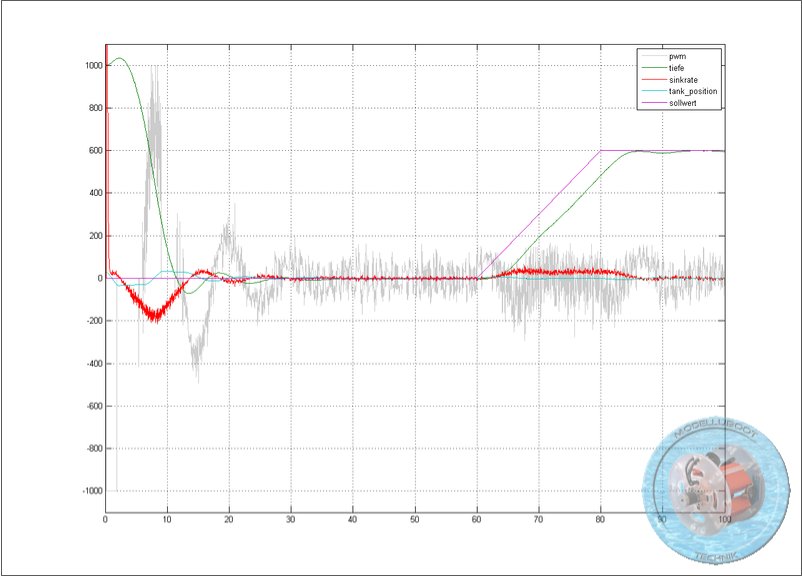
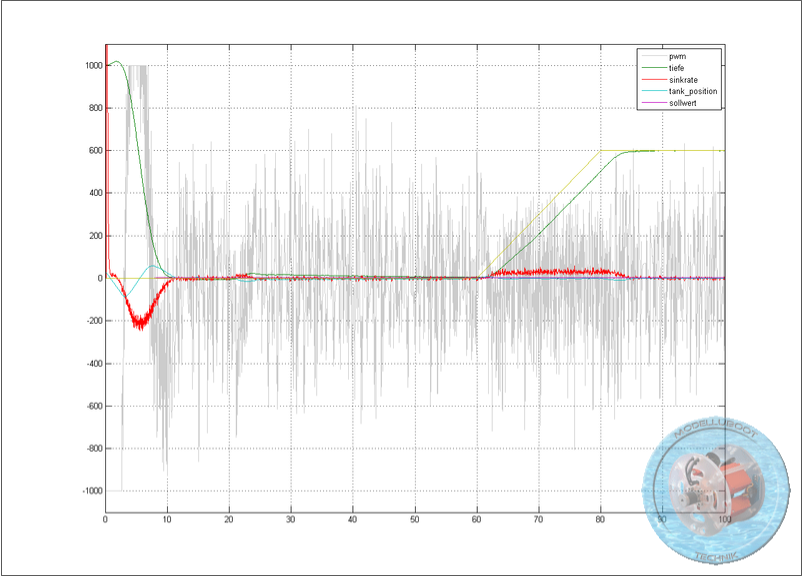
Tiefenregelung des Bootes.Die
beiden Diagramme rechts
zeigen mal einen Vergleich der
von uns getesteten
Regelungen. Oben die aktuell
verwendete Regelung und
unten die etwas komplizierter
einzustellende aber auch genauere strukturvariable
Regelung.

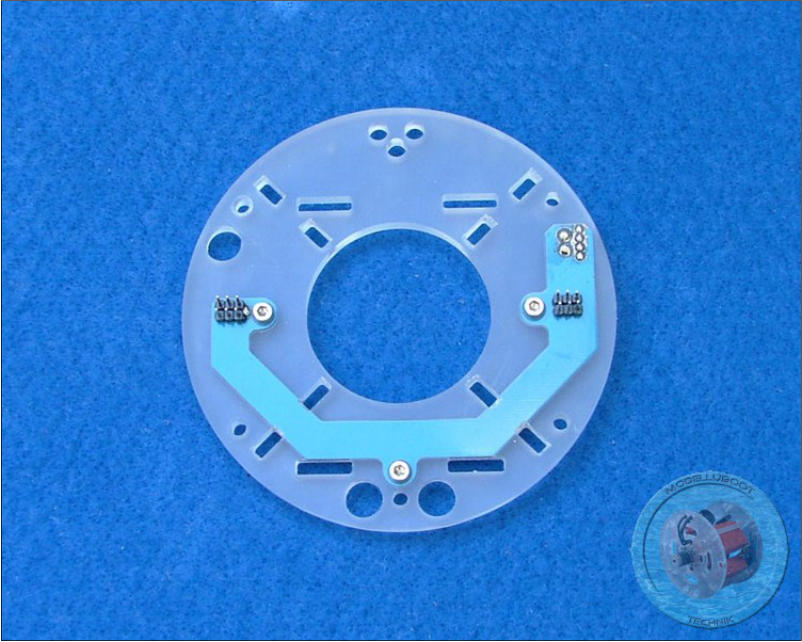
Simon hat das Layout und die Software für die 210 entwickelt und ich habe die Platinen
dann auf der CNC-Fräsmaschine angefertigt. Die Löcher in den Platinen sind zur
Durchfahrt der Gewinde- und Hilfstange des Tauchtanks gedacht.
Folgende Platinen sind zur Zeit verbaut:



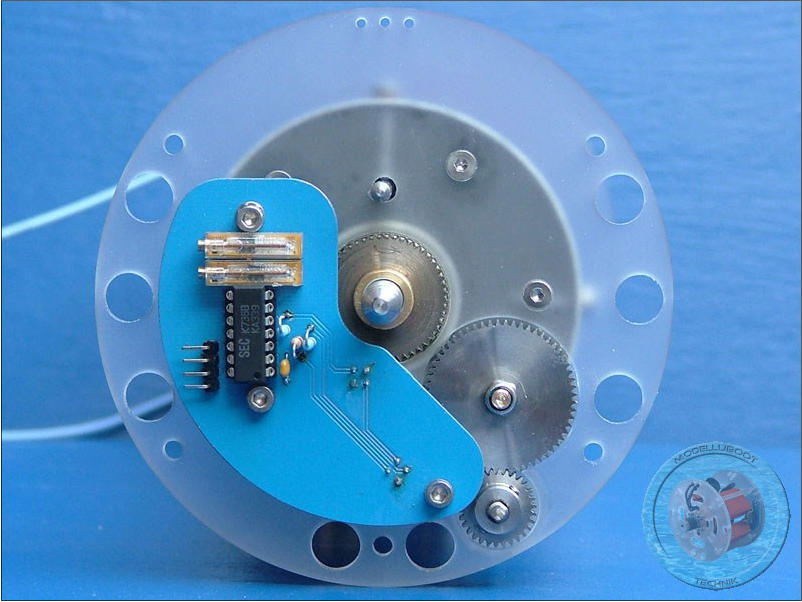
bestückt mit zwei 45 Grad versetzten
Optoreflexkopplern bildet sie in Verbindung mit der
Encoderscheibe am vorderen Tauchtankgetriebe
den Positionsgeber für den Tauchtank.

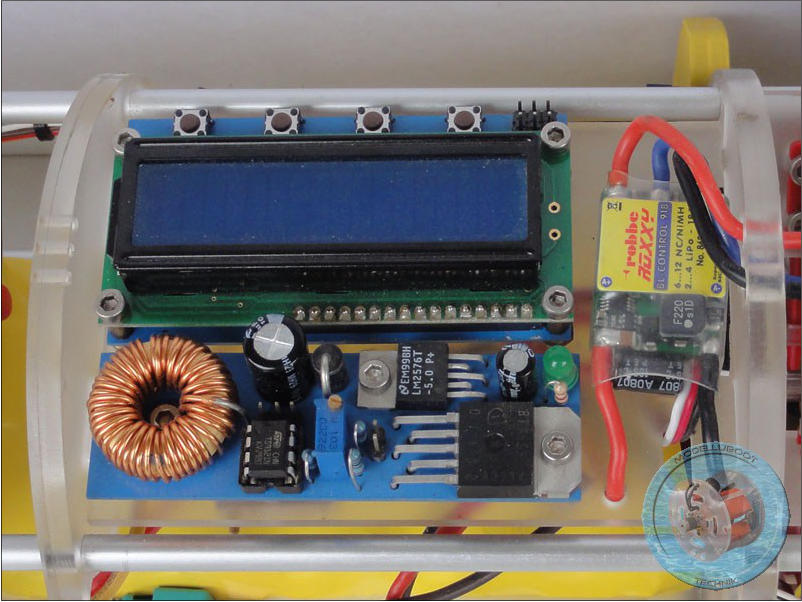
oben: Benutzerschnittstelle, dient zur Einstellung
diverser Parameter wie Tiefensollwerte,
Tauchtankparameter, Servo-Parameter etc. Desw
eitern können die aktuellen Ist-Zustände des
Bootes wie Tauchtankpositionen, Servo-Positionen,
Failsavemodus usw. angezeigt werden.
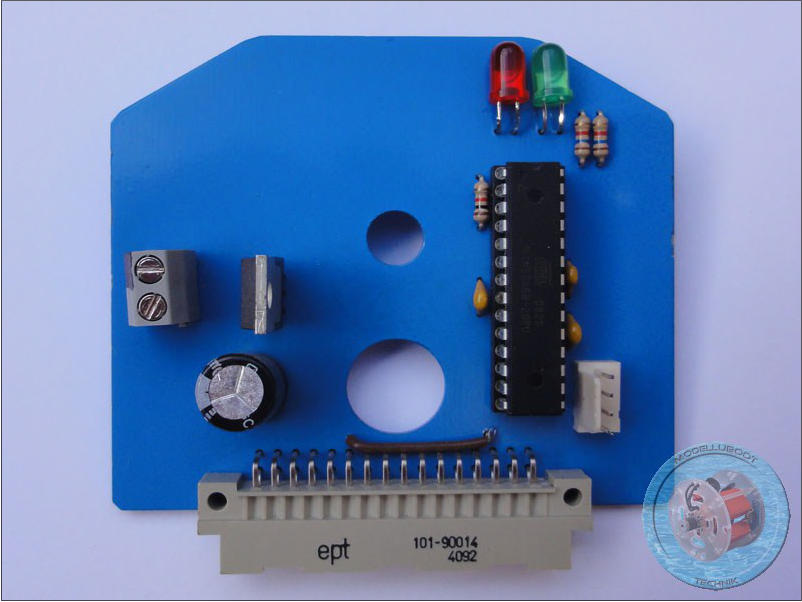
unten: Solid-State-Hauptschalter des Bootes,
stellt außerdem die 5V-Versorgungsspannung für
Servos, Controller etc. zur Verfügung.

folgt später .........
Proportionale Drehzahlsteuerung in beide
Drehrichtungen mit konfiguierbarer Motorbremse bei
Drehrichtungswechsel für aktuell einen Motor.
Video unten: Funktion Tauchtank mit statischer
Tiefenregelung
dient nur zur Unterverteilung der vier
Ruderservos. Hier kommen die vier
Signalleitungen von der Steuerung an und werden
auf die Servos verteilt. Die Stromversorgung wird
separat über 2mm Goldkontaktstecker
angeschlossen.