













Name:
Delta
Schiffstype:
Forschungsuboot
Länge:
57,50 cm
Breite:
13,75 cm
Maßstab:
1:8
Gewicht:
ca. 4500 g incl. Ballast
Antrieb:
Elektromotor 12V Bürste
Tauchsystem:
Doppelkolbentauchtank
Bemerkung:
Rumpfbausatz der Firma Brüggen
Erbauer:
Markus Reidegeld
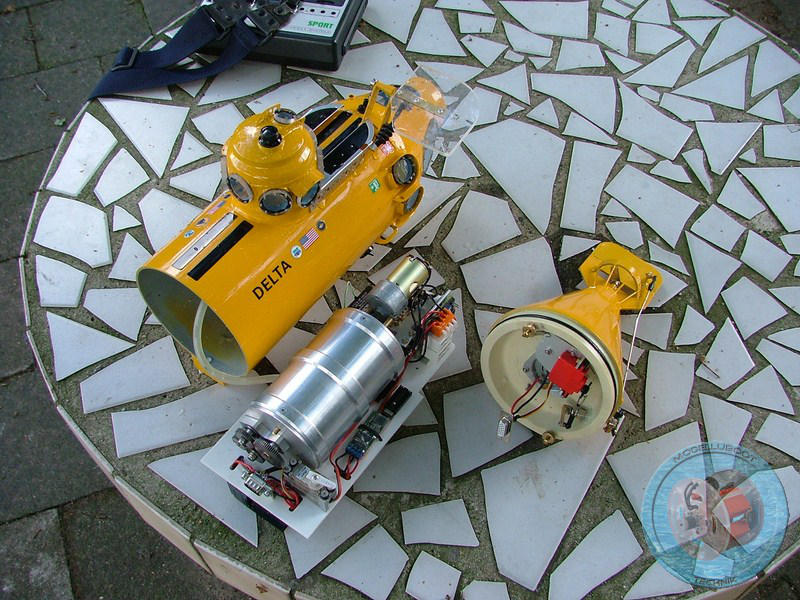
Der Bausatz
Die Delta wird als Bausatz im Maßstab 1:8 bei der Firma Modell-Uboot-Spezialitäten in mehreren Variationen
angeboten. (s.Bild-Delta) Es besteht die Möglichkeit, zwischen einem Standmodell, einem kompletten
Fahrmodell oder einem Fahrmodell mit Teilkomponeten zu wählen.
Im Gegensatz zu anderen Bausatzanbietern ist das schon eine feine Sache,
denn es ermöglicht eigene Konzepte in das Boot mit einzubringen, ohne das
die nicht gebrauchten Komponenten später in der Ecke rum liegen. Da ich ja
für meine Delta einen Kolbentank vorgesehen hatte, war die letzte Variante
genau die richtige Wahl für mich.
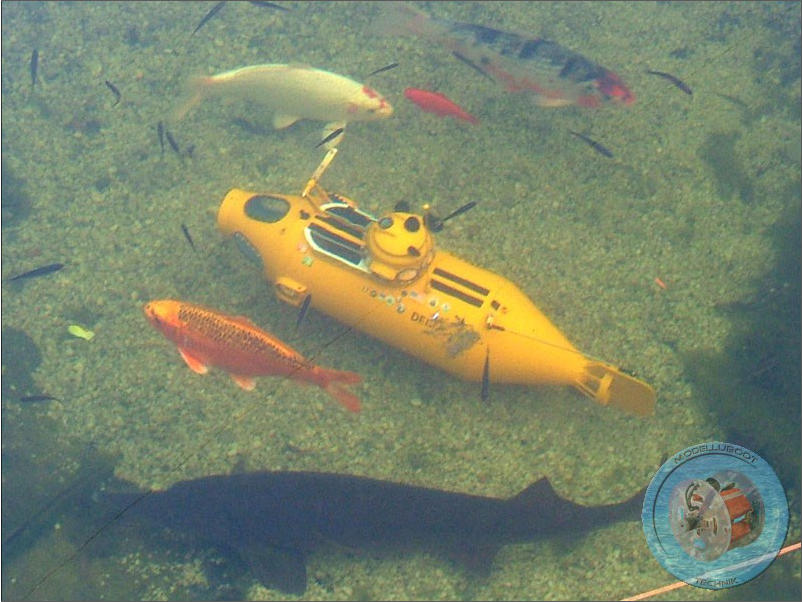
Die folgenden Bilder zeigen die Delta in ihrem Element. Die Delta ist zwar nicht schnell, dafür aber sehr wenig.
Die maximale Tauchtiefe die ich mit meiner Delta erreicht habe sind 4,75 m.
Sie ist wohlbehalten an die Oberfläche zurückgekehrt, hatte allerdings doch ein paar Tropfen Wasser im Boot.



Die Tauchtechnik
Als Tauchzelle sollte wie schon angesprochen ein Kolbentank zu Einsatz
kommen. Aufgrund der Abmessungen des Bootes kommt ein normaler
Einkolbentauchtank hier nicht in Frage, da bei zentrischem Einbau des
Tanks die Kolbenschubstange beim Fluten des Tanks an die Hülle des Bootes
stößt. Aus diesem Grund kommt hier nur ein Zweikolbentank in Frage. Der
Arbeitsweg wird hierbei auf zwei Kolben verteilt und somit halbiert. Für den
Betrieb eines Zweikolbentanks gibt es nun zwei Möglichkeiten. Entweder
man verwendet je einen Getriebemotor für jeden Kolben oder einen
Getriebemotor für beide Kolben und verbindet diese dann über ein Getriebe
und Hilfswelle miteinander. Da ich die erste Version mit zwei
Getriebemotoren schon öfters gesehen habe entschied ich mich, um mal was
Neues auszuprobieren für die zweite Variante mit einem Getriebemotor und der Hilfswelle.
Aufgrund der Abmessungen des Rumpfes und der Verwendung des im Bausatz vorgesehen Akkus ergaben sich
folgende maximale Abmessungen für den Tauchtank. Länge des Rohrs: 125 mm + Getriebe und 75 mm für den
Durchmesser.
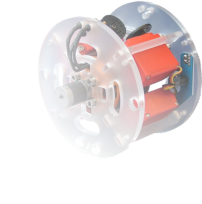
Als Rohr verwendete ich ein dickwandiges Aluminiumrohr welches Innen und
Außen noch passend auf Maß abgedreht werden musste. Die Deckel und
Kolben wurden aus 80 mm Vollmaterial gedreht. Als Dichtringe verwendete
ich handelsübliche O-Ringen mit einem Durchmesser von 2 mm. Der
Antriebsmotor für den Kolbentank ist ein Igarashi Getriebemotor von Conrad.
Dieser wird über Stirnzahnräder aus Stahl Modul 0,5 ebenfalls von Conrad mit
der Kolbenstange verbunden. Um die Kraft auch auf den gegenüberliegenden
Kolben zu übertragen benötigte ich noch eine Hilfswelle Durchmesser 4mm, die
ebenfalls über Stirnzahnräder mit den beiden Kolbenstangen verbunden
wird. Gelagert habe ich die Stirnzahnräder auf einer 8 mm starken
Aluminiumplatte, die ich an den Deckeln des Kolbentanks verschraubt habe
und zu Wartungszwecken leicht entfernen kann. Da der zweite Kolben die
gleiche Arbeitsrichtung wie der an der Motorseite haben muss benötigt er ein
Zahnrad mehr als die Motorseite, um die Drehrichtung umzukehren.
Damit sich die Kolben beim Arbeitsvorgang nicht verdrehen und somit sich
der Endabschaltpunkt verstellt habe ich noch an jedem Kolben eine
Hilfsführung in Form einer 3mm Messingstange geschraubt. Die Abtastung
der Endabschaltpunkte erfolgt nur an der Motorseite, da der zweite Kolben ja nur den Bewegungen des ersten
folgt.





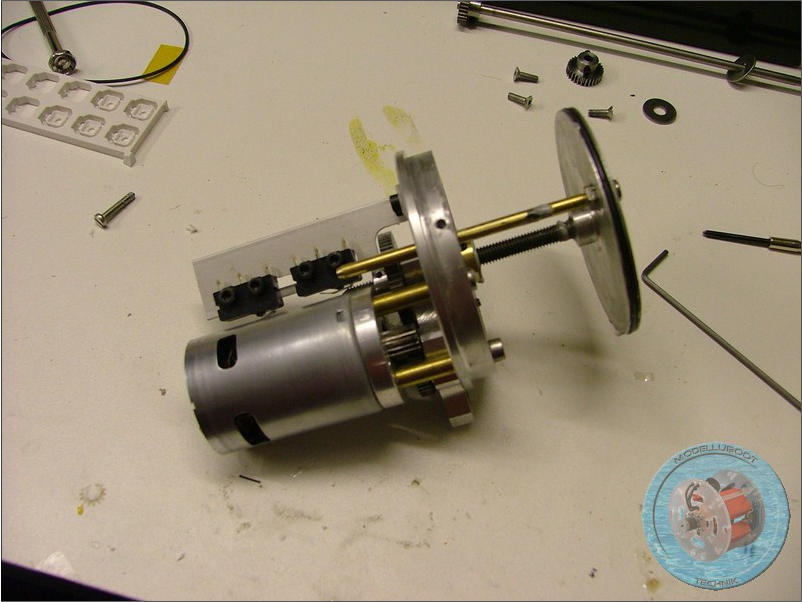
Der direkt angetriebene Kolben
Der Tauchtank ist fast fertig
Das Technikgerüst
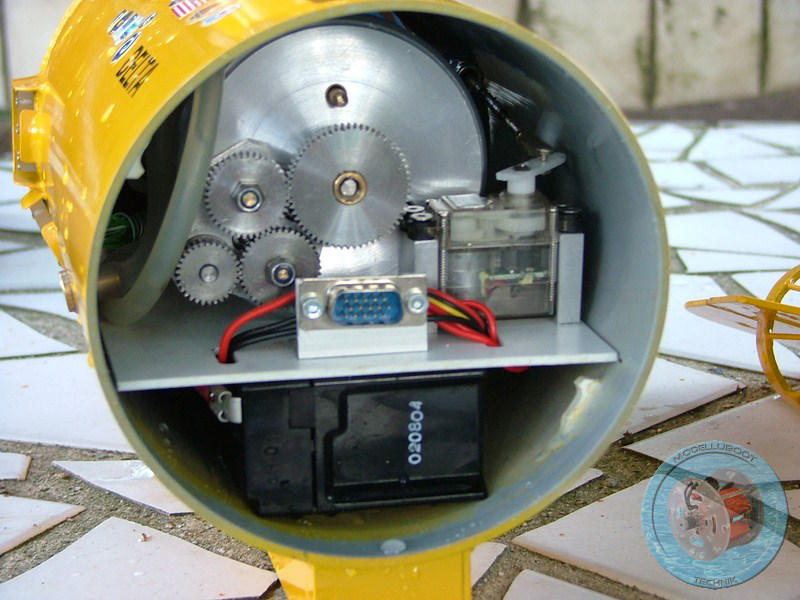
Nach der Fertigstellung des Kolbentanks habe ich mich dem Technikgerüst
zugewendet. Wobei das Wort Technikgerüst wohl ein wenig hoch gegriffen ist.
Es handelt sich hierbei um eine an den Rumpf angepasste Kunststoffplatte auf
denen die einzelnen Komponenten befestigt bzw. verschraubt werden. Als
erstes habe ich die zentrale Komponente, den Tauchtank auf der Technikplatte
positioniert. Durch seine Plangefräste Unterseite liegt dieser sehr gut auf der
Platte auf und ich brauchte ihn nur noch von
der Unterseite der Technikplatte mit M3
Senkkopfschrauben aus V2A verschrauben.
Senkkopfschrauben deshalb, weil ja zum Schluss der Akku noch an der
Unterseite der Platte befestigt werden sollte. Nach dem der Tauchtank nun
seinen Platz gefunden hatte konnte ich die anderen elektronischen
Komponenten auf der Technikplatte verteilen. Als ich für alles einen Platz
gefunden hatte, habe ich dann die Bohrungen für die Befestigungen und
Kabeldurchführungen gebohrt. Je nach Bauteil habe ich sie dann verschraubt
oder einfach nur mit Kabelbinder festgezurrt. Vor dem Verdrahten der
einzelnen Bauteile habe ich den 12V Blei Akku einfach mit beidseitigem
Klebeband an der Unterseite der Technikplatte angeklebt. Was erstaunlich gut
hält. Jetzt noch alles verdrahtet und die Technikplatte war fertig.

Der Antrieb
So wie in der Bauanleitung vorgeschlagen, den Motor samt Haltung an die
Heckplatte zu verschrauben war in meinem Fall nicht möglich, da ja auf Grund
meiner Tauchtankkonstruktion die zweite Kolbenstange bis zum Heckspant
ausfährt. Und wie es immer so ist fährt die Kolbenstange genau in den Bereich
des Antriebsmotors. Also musste ich mir eine andere Lösung einfallen lassen
um den Motor aus dem Verfahrbereich der Kolbenstange zu bekommen. Zwei
Möglichkeiten zog ich dafür in betracht. Die erste Lösung bestand darin den
Motor über ein Riemengetriebe mit der Welle zu verbinden und ihn somit
seitlich aus dem Verfahrbereich herauszubringen. Diese Lösung war aber aufwendig und brauchte auch wieder
Platz für den Riemenantrieb. Darum entschied ich mich letztlich für die zweite
Variante, den Antriebsmotor in einer Art Motorgondel direkt in den hinteren
Freiflutraum zu versenken. Dadurch dass ich den Motor saugend in die
Motorgondel eingepasst habe wird dieser auch noch von dem ihm
umgebenden Wasser gut gekühlt. Die Bohrlöcher für die Verschraubung der
Motorgondel habe ich genau dem originalen Motorträger des Bausatzes
angepasst und konnte somit auch mit den Bauplanmaßen weiterarbeiten. Bis
auf das kürzen der Welle waren also keine weiteren Änderungen mehr nötig.
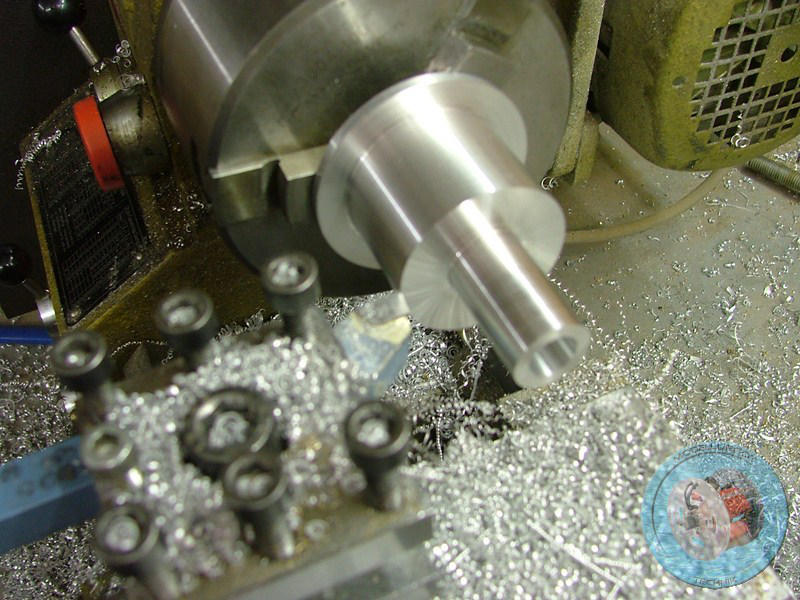
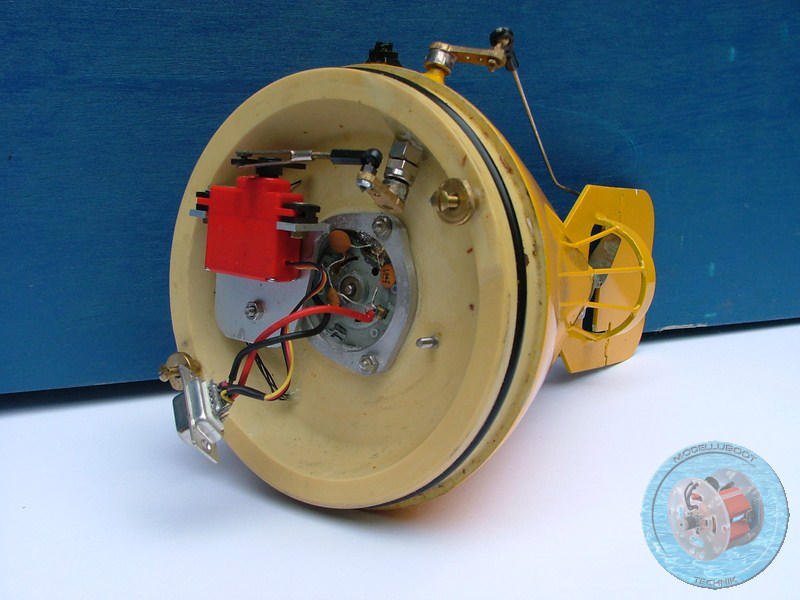

Bild links: zeigt die geänderte Ruderanlenkung

optimiert ab
1280 x 768








