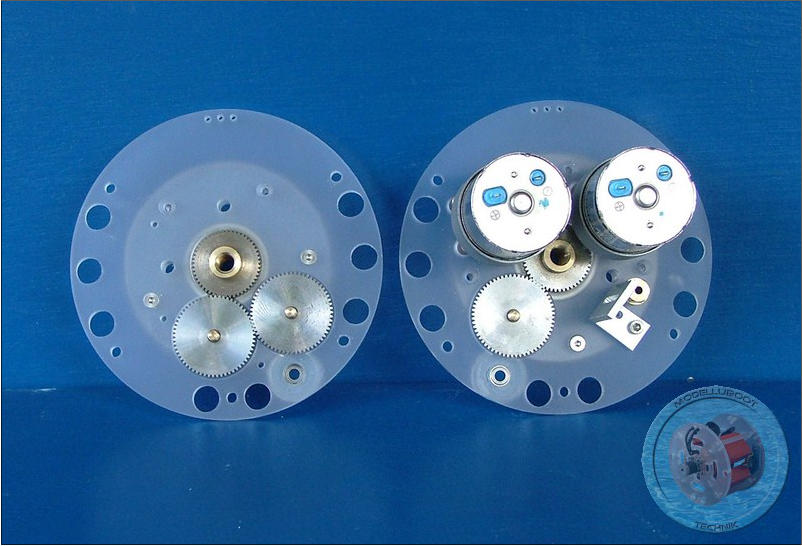
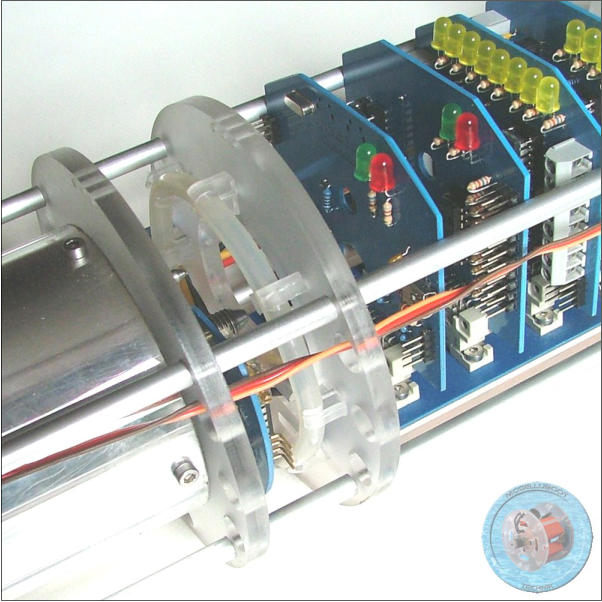
Bild rechts: Unser Tauchtank ist ein
Doppelkolbentauchtank mit zwei
gegenläufig angetriebenen Kolben.
Er ist etwas aufwendiger gebaut als
ein normaler Tauchtank hat aber
dafür den Vorteil der fixen
Schwerpunktlage. Egal ob der DKTT
flutet oder lenzt, der Schwerpunkt
bleibt immer in der Mitte des Tanks.
Die Deckel sind aus satiniertem Acrylglas
gefertigt und das Druckrohr ist eine alte
Bildtrommel aus einem Kopierer. Als Motoren
dienen zwei RB35.
Angetrieben wird Kolben Nr.1. Kolben Nr. 2 ist
praktisch nur ein Mitläufer, der über eine Hilfswelle angetrieben wird.
Die Positionserfassung des DKTT erfolgt mittels eines
Optoreflexkopplers am zweiten Kolben.
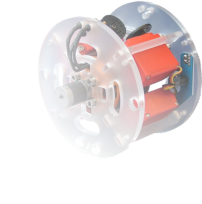
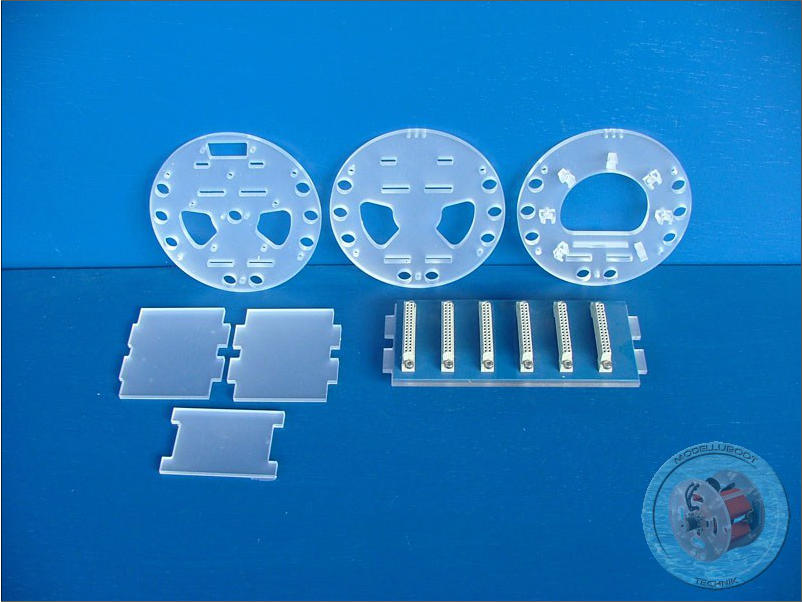
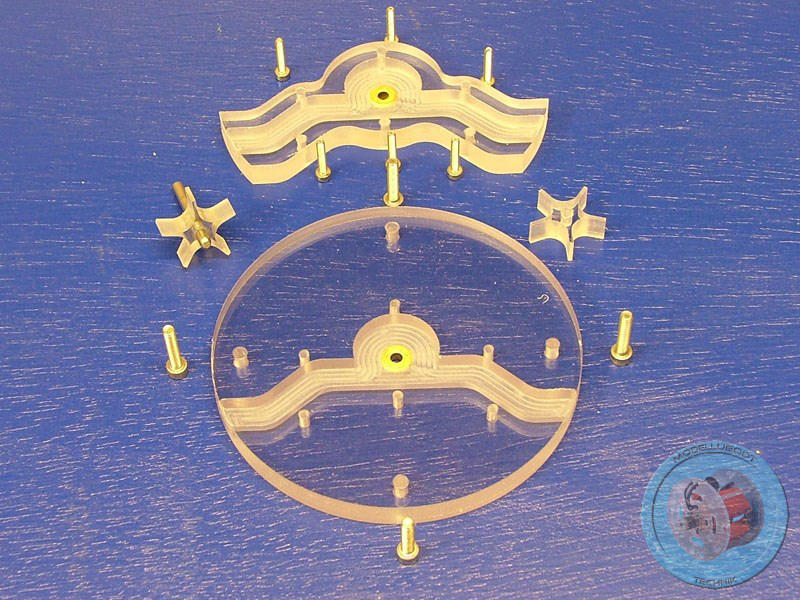
Bilder rechts:
Die Antriebssektion:
Sie besteht aus dem Scorpion 4025
Außenläufer, den vier X-Ruderservos, der
Servo-Verteilerplatine und dem Technikträger.
Der Außenläufer dreht ca. 332 U/Volt und wird
mit einer Spannung von ca. 11,1 Volt versorgt.
Als Regler verwenden wir einen Roxxy BL
Control 918.
Die X-Ruderservos sind einfache Mini HD von
Multiplex.
Über die Servoplatine werden die Signale von der
Steuerung auf die einzelnen Servos verteilt.
Das hat den Vorteil, dass die Kabel an den Servos kürzer
sind und somit nicht in die rotierende Glocke geraten
können. Technikgerüst und Servoträger bestehen aus satiniertem Acrylglas.















Name:
210TR
Schiffstype:
Unterseeboot
Länge:
134,00 cm
Breite:
12,50 cm
Maßstab:
1:43,75
Gewicht:
ca. 13000 g
Antrieb:
Bürstenloser Außenläufer 11,1 V
Tauchsystem:
Doppelkolbentauchtank
Bemerkung:
statische Tiefenregelung, Pressluft
Notsystem
Erbauer:
Markus Reidegeld, Simon Topmann




Bilder rechts: Herstellung von Bug
und Heck der 210 TR



Bilder rechts: Das Deck hat Simon in
Spantbauweise erstellt, der Turm ist aus einer
Multiplex Sperrholzplatte herausgearbeitet.
Bilder links: In dem Versorgungsmodul
sind der Lithium Ionen Akku, der
Antriebsregler, der Spannungsregler und
das Displaymodul untergebracht.
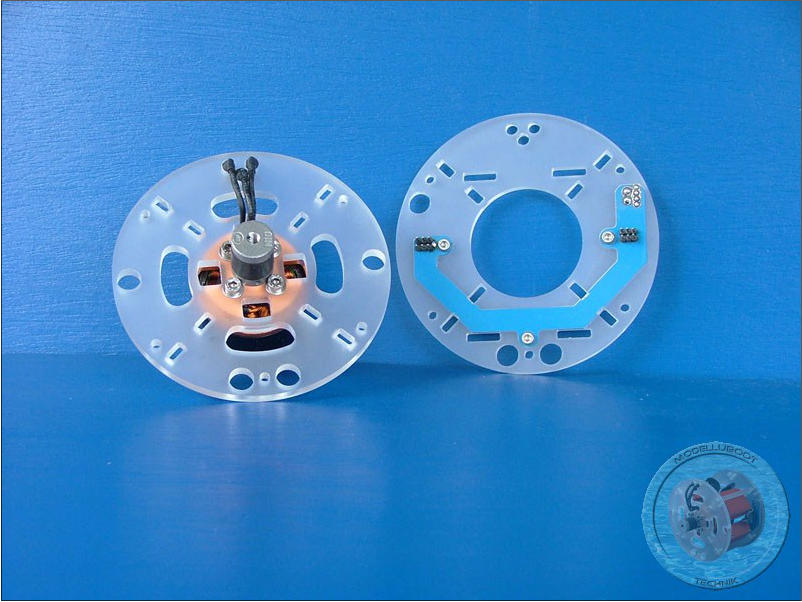
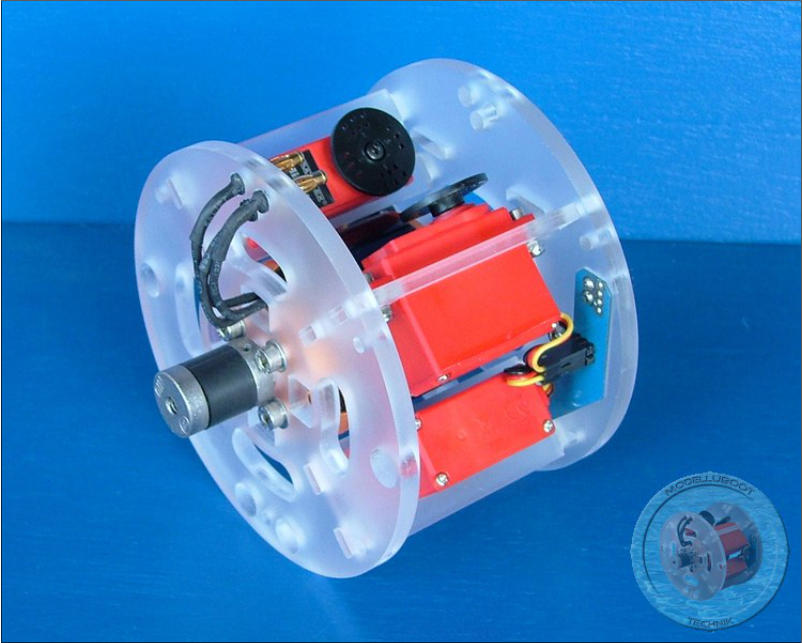
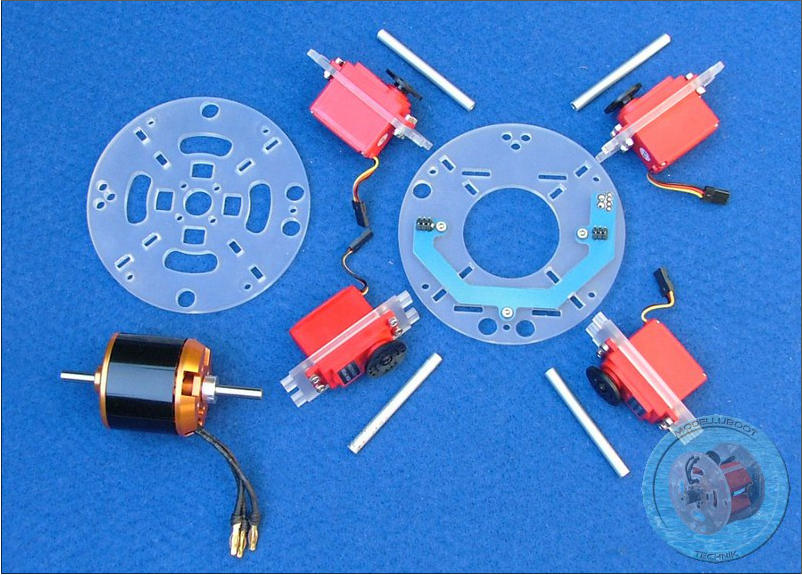
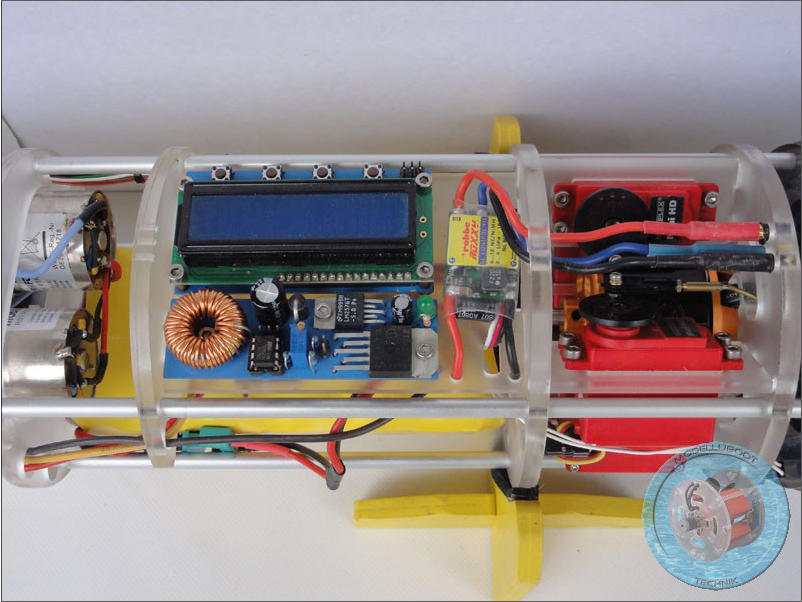
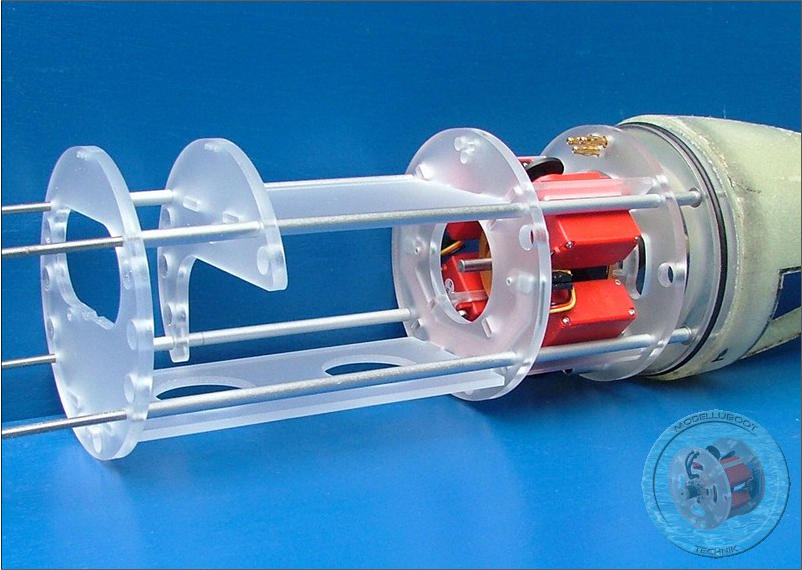
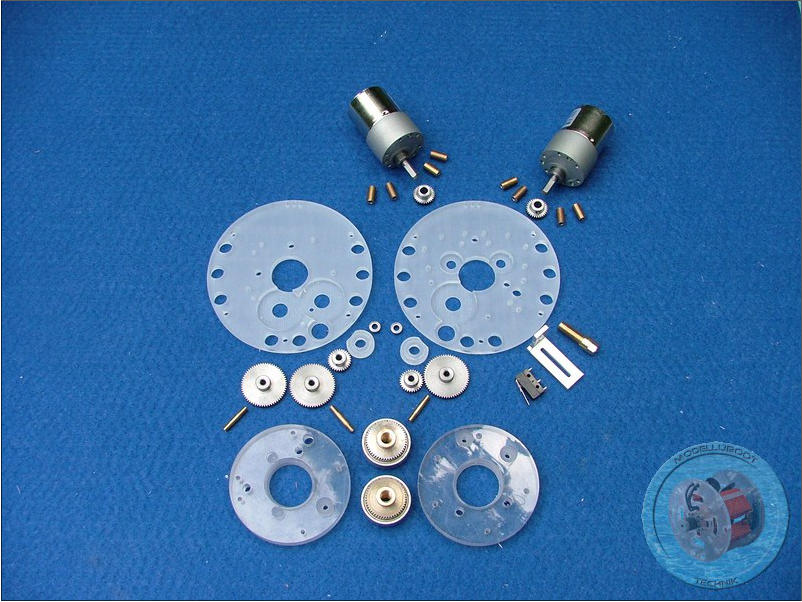
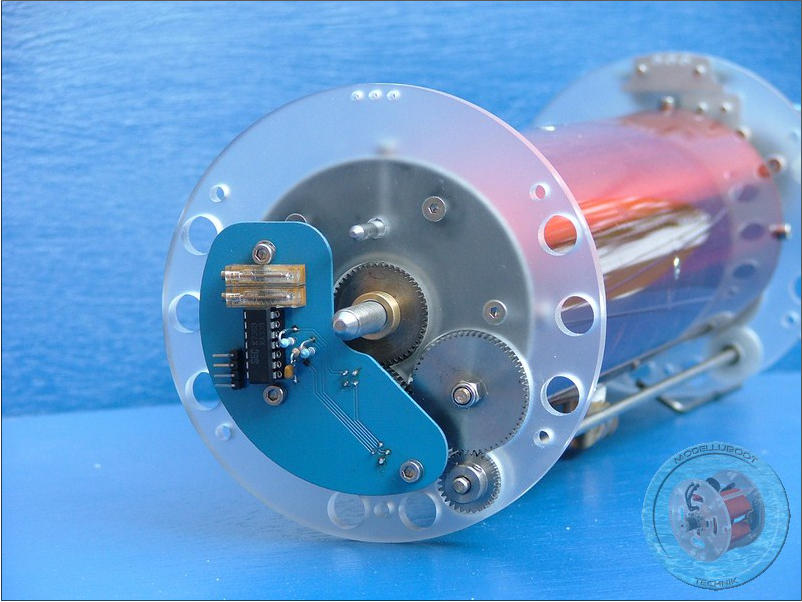
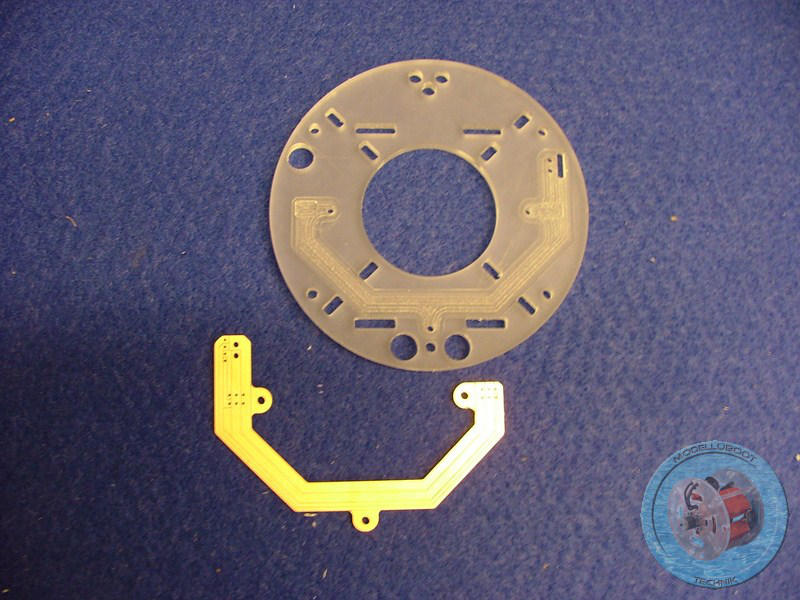
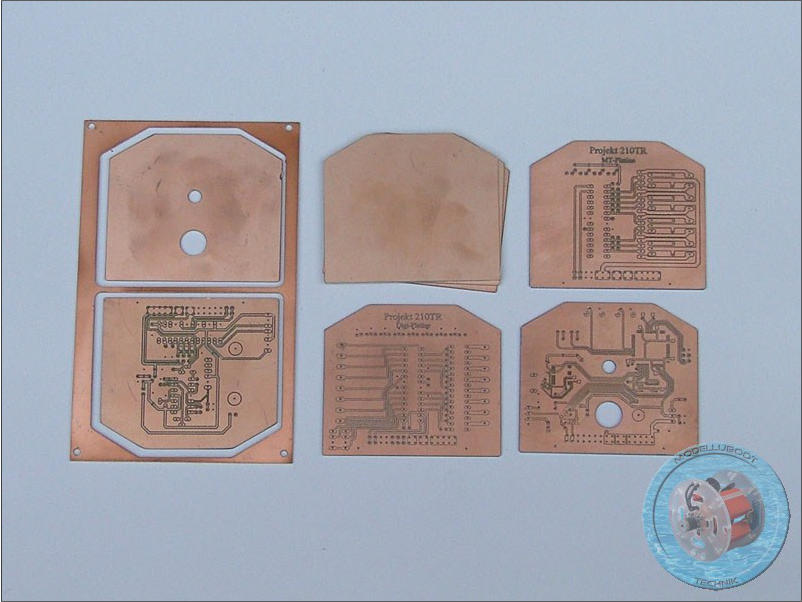
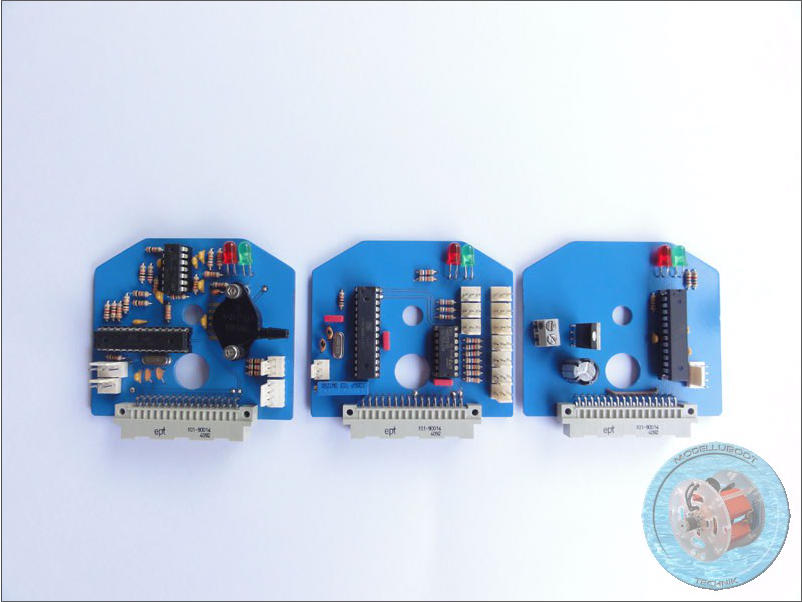
Bild links:
Die Steuerungssektion:
Die erste Version der Steuerung bestand aus 5 Hauptplatinen die
steckbar auf einer Versorgungsplatine angebracht waren. Als
Träger für die Versorgungsplatine dienen zwei Spanten und eine
mittels Zapfen verbundene Grundplatte aus 4mm Acrylglas. Auf
diese 4mm Acrylglasplatte ist die Versorgungsplatine mit den
sechs Steckplätzen (ein Reserveplatz) fest verschraubt. Die
Spanten werden wie bei den anderen Sektionen auch von
Aluminiumrohre auf Abstand gehalten. Allerdings haben die
Aluminiumrohre in dieser Sektion kleine Einfräsungen um auch
die eingesetzten Platinen auf Position zu halten.
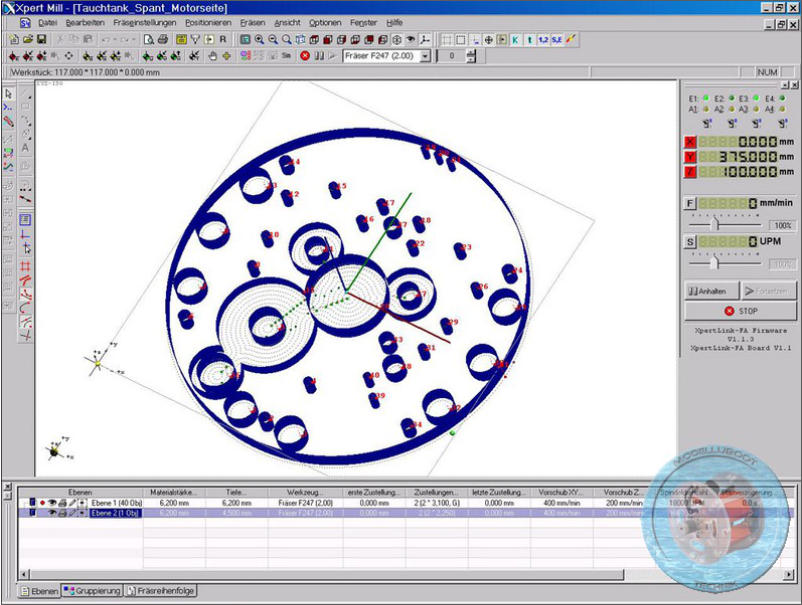
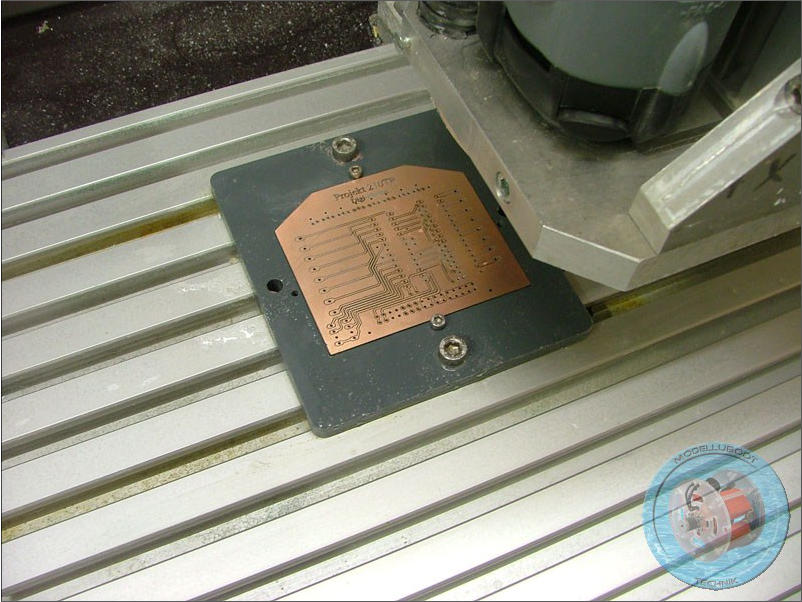
Das Layout der Platinen hat Simon mit Hilfe des
Freewareprogramms Eagle erstellt. Mit Hilfe einiger
Zusatzprogramme von Eagle habe ich sie dann auf der CNC
gefräst. Da die Platinen nah am Tauchtank plaziert sind sind die
ersten drei Platinen mit je zwei Löchern versehen um ein
durchfahren der Kolben- und Hilfsstange des DKTT zu
gewährleisten.
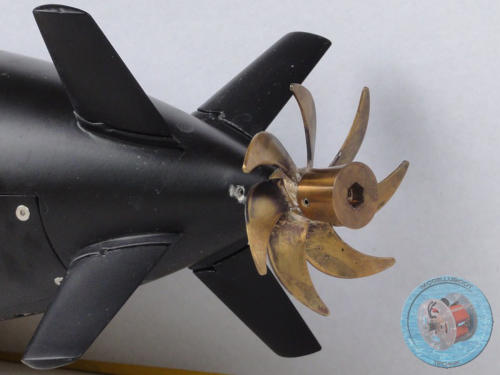
Bilder links: Die erste selbstgelötete
Sichelschraube. Für den ersten Versuch
ganz gut denke ich.


Bilder rechts: Im Bug sind das
Querstahlruder und das Bajonett zum
Verschließen des Bootes untergebracht.
Das Querstahlruder ist demontierbar und
soll nicht verklebt werden.
Angeschraubt wird das Querstahlruder
dann am vorderen Bajonett.




Bilder links: Nach vielen Stunden Arbeit
stand dann der erste Test am See an.
Der erste Test im Wasser fand noch ohne
Schraube statt, nur um die Dichtigkeit
und die einzelnen Komponenten zu
testen. Beim nächsten mal ging es dann
mit Schraube auf den See.




Bilder rechts: Die Luken im Deck sind
eingebaut und fertig besandet und lackiert.
Einige Luken lassen sich öffnen um an die
Decksverschraubung oder den Kugelkopf
der vorderen Tiefenruder zu kommen. Die
vorderen Tiefenruder sind auch eingebaut,
aber im Moment nur mit manueller
Funktion.
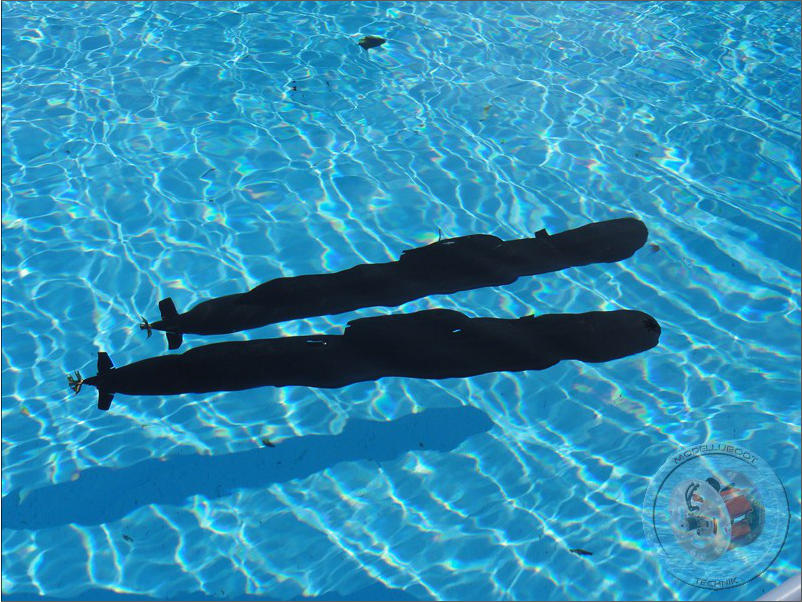
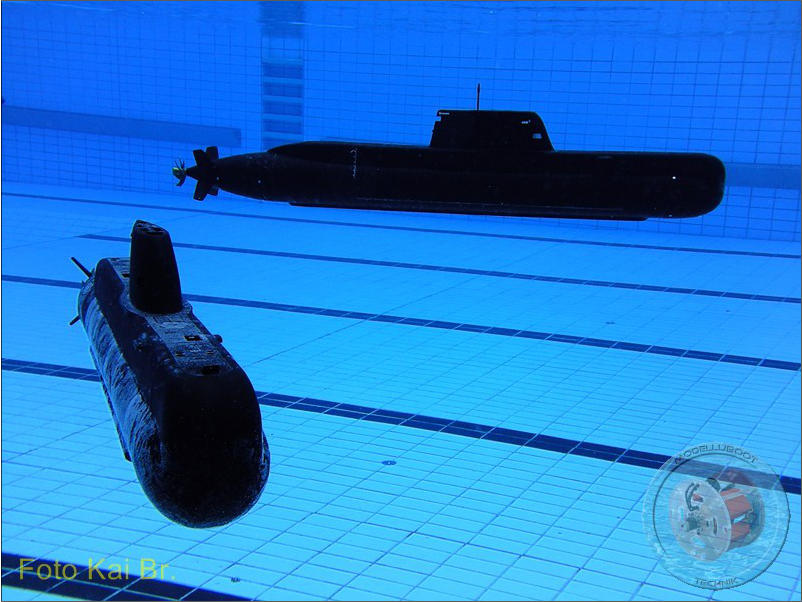
Bilder links: Beide Boote auf einem
Schaufahren in Bochum-Werne. Dort gab
es ein schönes Becken um die statische
Tiefenregelung die Simon entwickelt hat
zu testen.

optimiert ab
1280 x 768
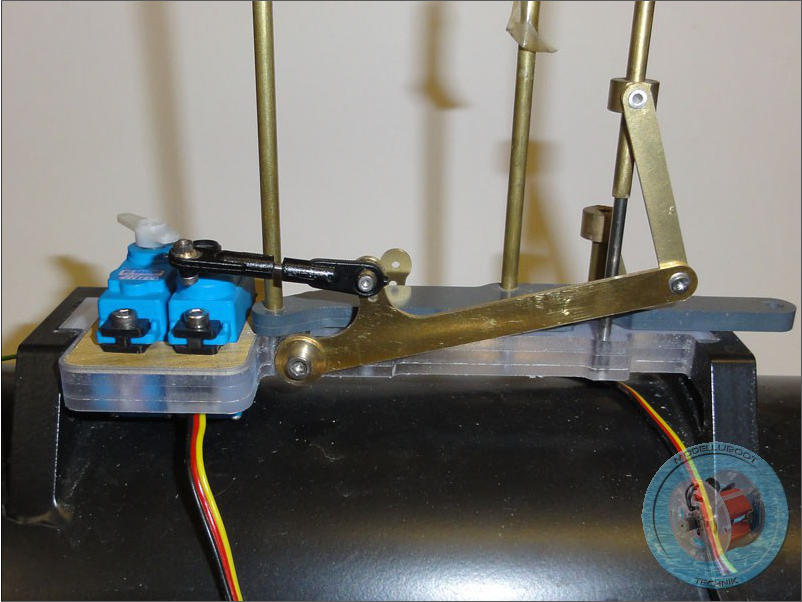
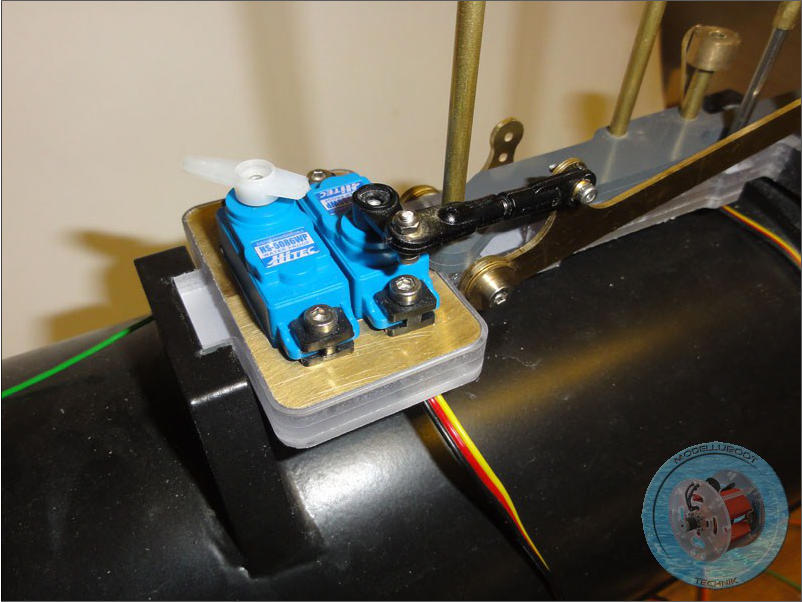
Bilder rechts: Die Ausfahrgeräte sollen
mittels zwei wasserdichten Servos
ausgefahren werden. Die Bilder zeigen
den aktuellen Versuchsaufbau.
07.03.2012 Ein Video vom ersten Test der AFG’s
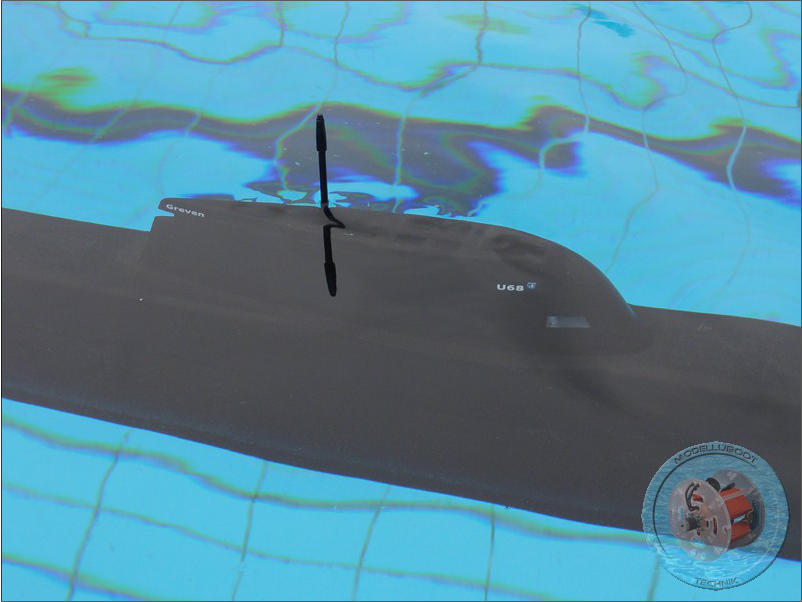
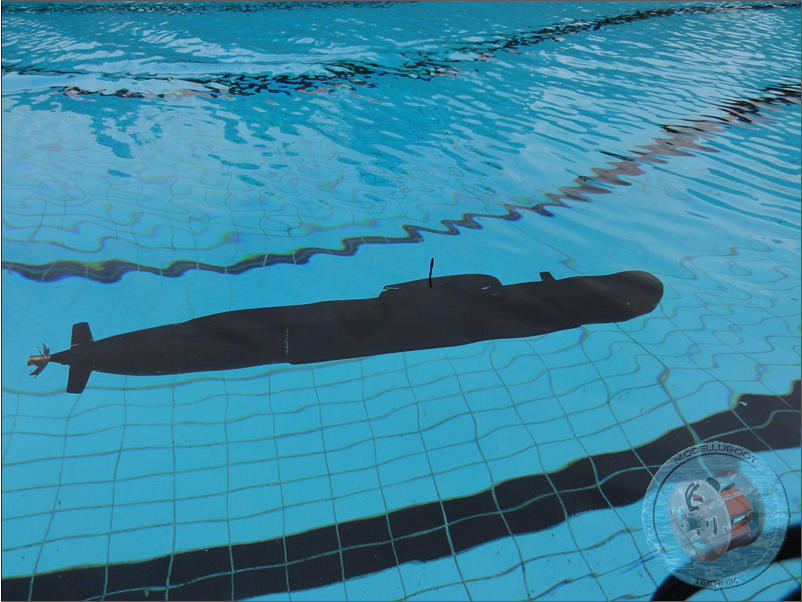
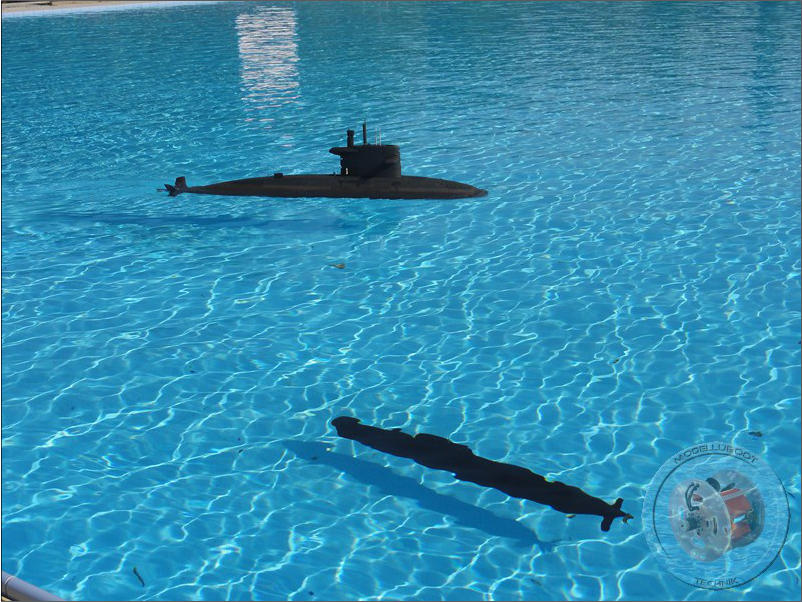
Die 210TR mit fertiger Beschriftung und
Positionslampen im Freibad im Einsatz.
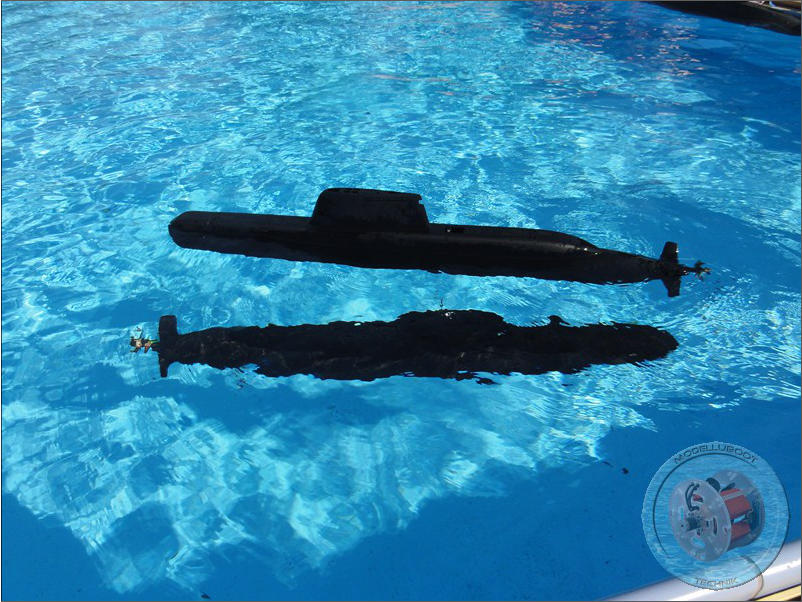
Unter Wasser Beide 210TR mit aktivem
statischem Tiefenregler auf Parkposition.